Matlab求大神帮忙啦……这个题不会做……怎么设计程序……我是小白
最新回答

半袖桃花
2024-09-23 05:50:21
几天前就编好了程序,一直没顾上上传。
(1)求猎狗最小速度的问题:
理论分析请参考下述文献:钱杏芳,导弹飞行力学,北理工出版社,2000.8
p97,式4-11
追踪法,从开始到命中目标所需时间为
tk = r0 ( p + cos(q0) ) / ( ( p^-1 ) * Vt )
取基准线平行于兔子运动方向,则q0=-pi/2,cos(q0)=0,所以
tk = r0/Vt * p/(p^2-1)
所需最小速度即为,兔子刚好在tk时间内跑到A点,即求解下面的方程:
s = r0 * p/(p^2-1)
其中s=120为OA长度,r0=200为OB长度。解出p(注意取正数解)再乘以兔子速度即可。
r0 = 200;
Vt = 8;
% 兔子移动的距离
s = 120;
% (1)猎狗最小速度
% 钱杏芳,导弹飞行力学,北理工出版社,2000.8
% p97,式4-11
% 追踪法,从开始到命中目标所需时间为
% tk = r0 ( p + cos(q0) ) / ( ( p^-1 ) * Vt )
% 取基准线平行于兔子运动方向,则q0=-pi/2,cos(q0)=0,所以
% tk = r0/Vt * p/(p^2-1)
syms p
p = solve( s - r0 * p/(p^2-1) );
p = double(p);
p = p(p>=0);
V = Vt * p
答案为
V =
17.0803
(2)猎狗跑过的时间和路程
由上一步的结果很容易求出:
tk = r0/Vt * p/(p^2-1)
S = V * tk
答案为
tk =
15.0000
S =
256.2050
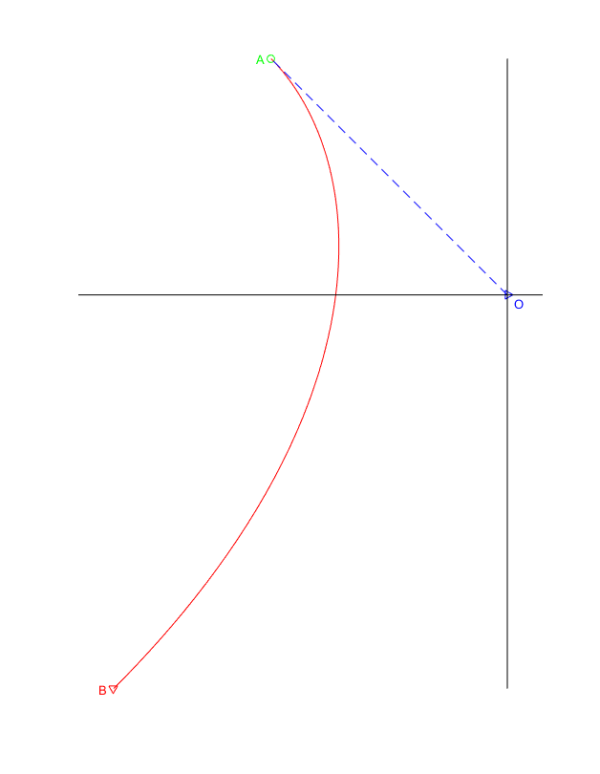
(3)画出猎狗奔跑的曲线图
可以用ode45求解,需要注意适当减小求解器的误差控制参数RelTol和AbsTol。
代码在下一步统一给出。
(4)这一步的要求已经很难通过理论分析来做了。
可以用数值方法解微分方程,但所涉及的问题对于一般的初学者应该是比较难以处理的。
我把主要涉及的问题尽量提到,但不会详细讲解。题主既自称“小白”,就请不要就这个问题问太多了,否则展开讲太繁琐了。
主要涉及到的问题:
a、速度是变化的,需要把两个速度也作为状态变量,相应增加两个微分方程。
b、需要设置结束事件,让猎狗追到兔子后就停止仿真。
c、此处特别需要减小求解器的误差控制参数RelTol和AbsTol,否则在猎狗接近兔子时,相对方位几乎成了随机数,最后的一段时间差不多在做布朗运动了。
d、程序采用嵌套函数的结构,以方便函数间共享几个相关的变量。
参考代码:
function dog_chase_rabbit
r0 = 200;
Vt = 8;
% 兔子移动的距离
s = 120;
% (1)猎狗最小速度
syms p
p = solve( s - r0 * p/(p^2-1) );
p = double(p);
p = p(p>=0);
V = Vt * p
% (2)猎狗跑过的时间和路程
tk = r0/Vt * p/(p^2-1)
S = V * tk
% (3)曲线图
psi1 = pi / 4;
psi2 = pi * 3 / 4;
X0 = [r0*cos(psi1+pi); r0*sin(psi1+pi); 0; 0];
opt = odeset('reltol',1e-6,'abstol',1e-7);
[t,X] = ode45(@chase, [0 tk], X0,opt);
plot_res(1)
function dX = chase(t, X)
% X(1,2) - x1 y1
x1 = X(1); y1 = X(2);
x2 = X(3); y2 = X(4);
Q = atan2(y2-y1, x2-x1);
dX = [ ...
V * cos(Q); V * sin(Q); ...
Vt * cos(psi2); Vt * sin(psi2) ...
];
end
function plot_res(i)
figure(i)
clf
hold on
plot(s*cos(psi2),s*sin(psi2),'go')
text(s*cos(psi2),s*sin(psi2),'A ','Horiz','right','color','g')
plot(X0(1),X0(2),'rv')
text(X0(1),X0(2),'B ','Horiz','right','color','r')
plot(X0(3),X0(4),'b>')
text(X0(3),X0(4),' O','Horiz','left','Vert','top','color','b')
plot(X(:,1),X(:,2),'r-',X(:,3),X(:,4),'b--')
axis equal off
plot([0 0],ylim,'k')
plot(xlim,[0 0],'k')
end
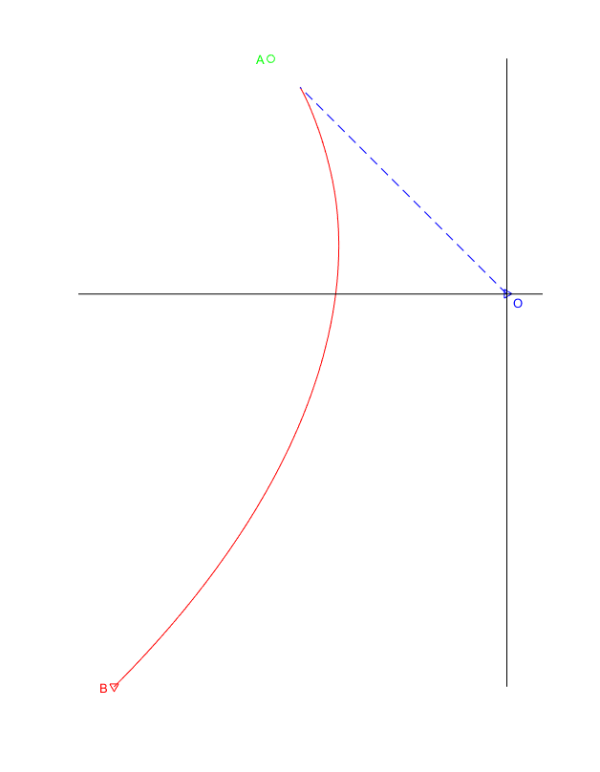
% (4)如果距离为30米时,兔子速度每秒减半,猎狗速度每秒增加1.1倍
% 此时应考虑把两个速度也作为状态变量,并且设置结束事件
X0 = [r0*cos(psi1+pi); r0*sin(psi1+pi); 0; 0; V; Vt];
opt = odeset('reltol',1e-6,'abstol',1e-7,'Events',@events);
[t,X] = ode45(@chase2, [0 tk], X0,opt);
plot_res(2)
S = sum(sqrt(diff(X(:,1)).^2+diff(X(:,2)).^2))
tk = t(end)
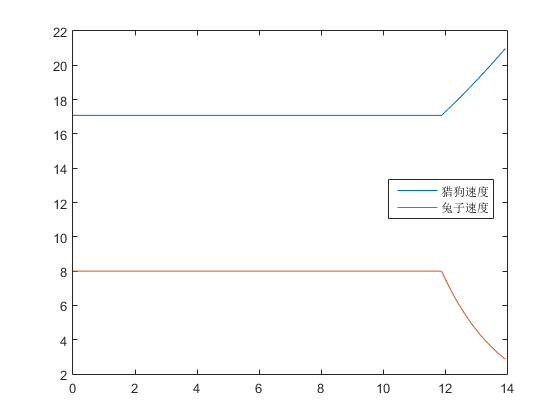
figure(3)
plot(t,X(:,5:6))
legend('猎狗速度','兔子速度',0)
function dX = chase2(t, X)
% 提取状态变量
x1 = X(1); y1 = X(2);
x2 = X(3); y2 = X(4);
V = X(5); Vt = X(6);
Q = atan2(y2-y1, x2-x1);
% 考虑速度变化
d = sqrt((x2-x1)^2+(y2-y1)^2);
dV = 0.1 * V * (d <= 30);
dVt = -0.5 * Vt * (d <= 30);
% 微分方程
dX = [ ...
V * cos(Q); V * sin(Q); ...
Vt * cos(psi2); Vt * sin(psi2); ...
dV; dVt ...
];
end
function [value,isterminal,direction] = events(t,X)
% 距离小于0.001时结束仿真
value = sqrt((X(3)-X(1))^2+(X(4)-X(2))^2) - 1e-3;
isterminal = 1;
direction = -1;
end
end
热门标签
