雪是一种能够令人产生多种情绪的东西,当窗外那像柳絮、像芦花般的雪花,正在纷纷扬扬地从天而降的时候,当大地被雪花装饰得像铺上白色的地毯一样的时候,站在窗户边上,望着它们。
最近需要做一个围棋识别的项目,首先要将棋盘位置定位出来,效果图如下:
效果图
原图

中间处理效果
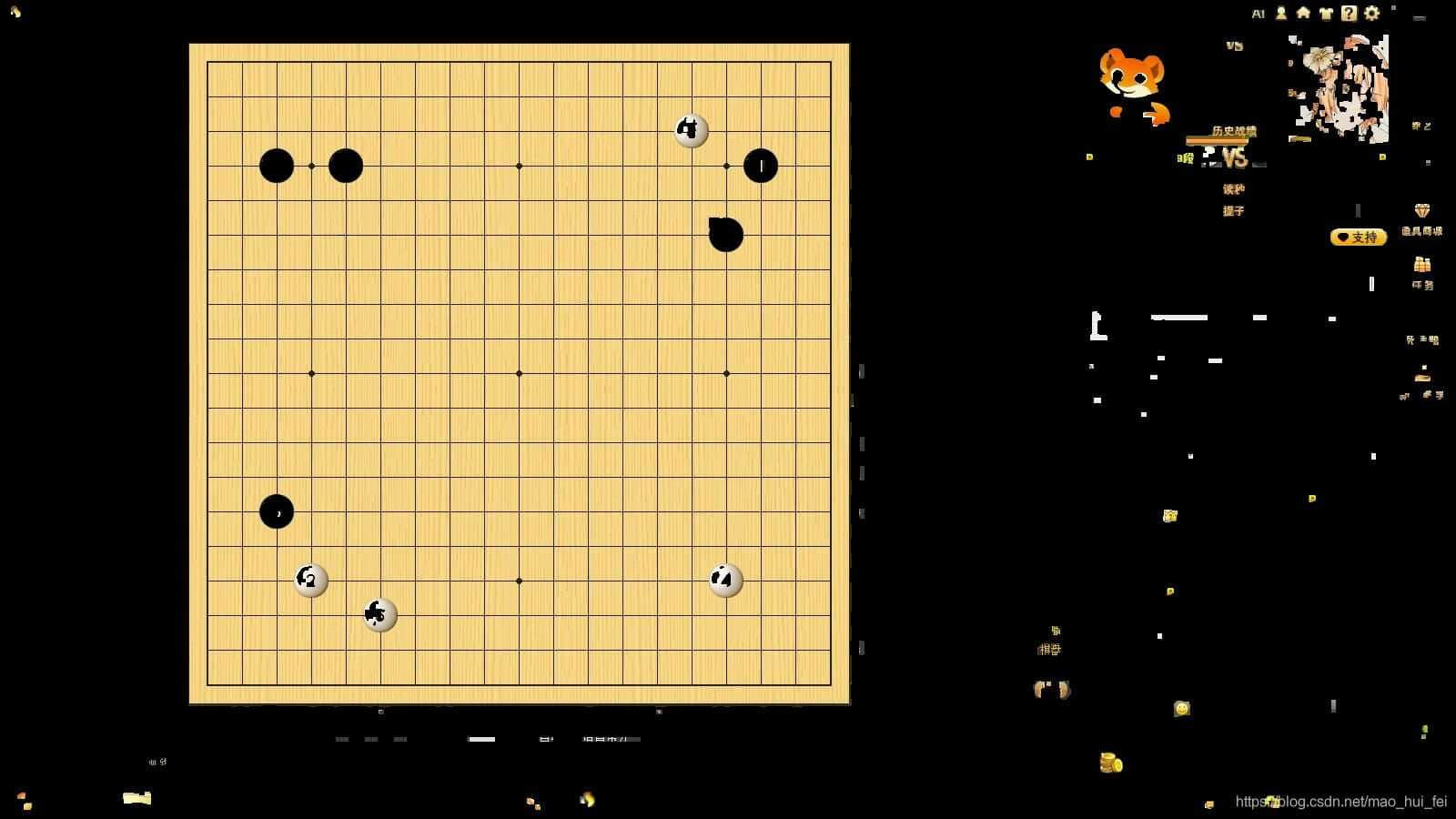
最终结果

思路分析
我们利用python opencv的相关函数进行操作实现,根据棋盘颜色的特征,寻找到相关特征,将棋盘区域抠出来。最好从原始图像中将棋盘位置截取出来。
源码:定位棋盘位置
from PIL import ImageGrab
import numpy as np
import cv2
from glob import glob
imglist = sorted(glob("screen/*.jpg"))
for i in imglist:
# while 1:
img = cv2.imread(i)
image = img.copy()
w,h,c = img.shape
img2 = np.zeros((w,h,c), np.uint8)
img3 = np.zeros((w,h,c), np.uint8)
# img = ImageGrab.grab() #bbox specifies specific region (bbox= x,y,width,height *starts top-left)
hsv=cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
lower = np.array([10,0,0])
upper = np.array([40,255,255])
mask = cv2.inRange(hsv,lower,upper)
erodeim = cv2.erode(mask,None,iterations=2) # 腐蚀
dilateim = cv2.dilate(erodeim,None,iterations=2)
img = cv2.bitwise_and(img,img,mask=dilateim)
frame = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, dst = cv2.threshold(frame, 100, 255, cv2.THRESH_BINARY)
contours,hierarchy = cv2.findContours(dst, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
cv2.imshow("0",img)
i = 0
maxarea = 0
nextarea = 0
maxint = 0
for c in contours:
if cv2.contourArea(c)>maxarea:
maxarea = cv2.contourArea(c)
maxint = i
i+=1
#多边形拟合
epsilon = 0.02*cv2.arcLength(contours[maxint],True)
if epsilon<1:
continue
#多边形拟合
approx = cv2.approxPolyDP(contours[maxint],epsilon,True)
[[x1,y1]] = approx[0]
[[x2,y2]] = approx[2]
checkerboard = image[y1:y2,x1:x2]
cv2.imshow("1",checkerboard)
cv2.waitKey(1000)
cv2.destroyAllWindows()
带保存图像
from PIL import ImageGrab
import numpy as np
import cv2
from glob import glob
import os
imglist = sorted(glob("screen/*.jpg"))
a=0
for i in imglist:
# while 1:
a=a+1
img = cv2.imread(i)
image = img.copy()
w,h,c = img.shape
img2 = np.zeros((w,h,c), np.uint8)
img3 = np.zeros((w,h,c), np.uint8)
# img = ImageGrab.grab() #bbox specifies specific region (bbox= x,y,width,height *starts top-left)
hsv=cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
lower = np.array([10,0,0])
upper = np.array([40,255,255])
mask = cv2.inRange(hsv,lower,upper)
erodeim = cv2.erode(mask,None,iterations=2) # 腐蚀
dilateim = cv2.dilate(erodeim,None,iterations=2)
img = cv2.bitwise_and(img,img,mask=dilateim)
frame = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, dst = cv2.threshold(frame, 100, 255, cv2.THRESH_BINARY)
contours,hierarchy = cv2.findContours(dst, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
# 保存图片的地址
img_file_1 = "./temp"
# 确认上述地址是否存在
if not os.path.exists(img_file_1):
os.mkdir(img_file_1)
cv2.imshow("0",img)
cv2.imwrite(img_file_1 + "/" + 'temp_%d.jpg'%a, img)
i = 0
maxarea = 0
nextarea = 0
maxint = 0
for c in contours:
if cv2.contourArea(c)>maxarea:
maxarea = cv2.contourArea(c)
maxint = i
i+=1
#多边形拟合
epsilon = 0.02*cv2.arcLength(contours[maxint],True)
if epsilon<1:
continue
#多边形拟合
approx = cv2.approxPolyDP(contours[maxint],epsilon,True)
[[x1,y1]] = approx[0]
[[x2,y2]] = approx[2]
checkerboard = image[y1:y2,x1:x2]
cv2.imshow("1",checkerboard)
cv2.waitKey(1000)
# 保存图片的地址
img_file_2 = "./checkerboard"
# 确认上述地址是否存在
if not os.path.exists(img_file_2):
os.mkdir(img_file_2)
cv2.imwrite(img_file_2 + "/" + 'checkerboard_%d.jpg'%a, checkerboard)
cv2.destroyAllWindows()
到此这篇关于python识别围棋定位棋盘位置的文章就介绍到这了,更多相关python 围棋定位棋盘位置内容请搜索以前的文章或继续浏览下面的相关文章希望大家以后多多支持!