什么是锁
- 锁的本质,就是一种资源,是由操作系统维护的一种专门用于同步的资源
- 比如说互斥锁,说白了就是一种互斥的资源。只能有一个进程(线程)占有。当一个进程(线程)通过竞争获得锁的时候,其他进程(或线程)将得不到这把锁。这是内核代码决定的
- 如果我们希望某种资源在多个进程(线程/协程)之间共享,但是某一时刻最多有一个进程占有,这不就是互斥锁的概念吗,也就是说,我们希望自己的资源也变成一种锁
- 最简单的办法就是将自己的资源和操作系统定义好的锁绑定到一起。也就是说,进程要获取我的资源之前,必须要获得操作系统的锁。进一步说,得锁得资源,失锁失资源。这样的话,我们的资源也变成了一把锁
为什么使用锁
并发编程中保证数据一致性和安全性的
Golang中的锁
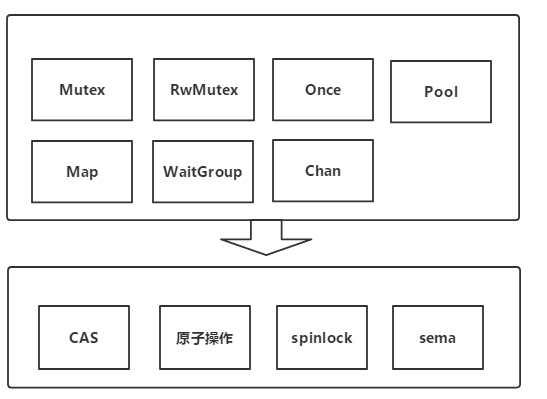
Golang的提供的同步机制有sync模块下的Mutex、WaitGroup以及语言自身提供的chan等。 这些同步的方法都是以runtime中实现的底层同步机制(cas、atomic、spinlock、sem)为基础的
1. cas、atomic
cas(Compare And Swap)和原子运算是其他同步机制的基础
- 原子操作:指那些不能够被打断的操作被称为原子操作,当有一个CPU在访问这块内容addr时,其他CPU就不能访问
- CAS:比较及交换,其实也属于原子操作,但它是非阻塞的,所以在被操作值被频繁变更的情况下,CAS操作并不那么容易成功,不得不利用for循环以进行多次尝试
2. 自旋锁(spinlock)
自旋锁是指当一个线程在获取锁的时候,如果锁已经被其他线程获取,那么该线程将循环等待,然后不断地判断是否能够被成功获取,知直到获取到锁才会退出循环。获取锁的线程一直处于活跃状态
Golang中的自旋锁用来实现其他类型的锁,与互斥锁类似,不同点在于,它不是通过休眠来使进程阻塞,而是在获得锁之前一直处于活跃状态(自旋)
3. 信号量
实现休眠和唤醒协程的一种方式
信号量有两个操作P和V
P(S):分配一个资源
1. 资源数减1:S=S-1
2. 进行以下判断
如果S<0,进入阻塞队列等待被释放
如果S>=0,直接返回V(S):释放一个资源
1. 资源数加1:S=S+1
2. 进行如下判断
如果S>0,直接返回
如果S<=0,表示还有进程在请求资源,释放阻塞队列中的第一个等待进程
golang中信号量操作:runtime/sema.go
P操作:runtime_Semacquire
V操作:runtime_Semrelease
mutex的使用
package main
import (
"fmt"
"sync"
)
var num int
var mtx sync.Mutex
var wg sync.WaitGroup
func add() {
mtx.Lock() //mutex实例无需实例化,声明即可使用
defer mtx.Unlock()
defer wg.Done()
num += 1
}
func main() {
for i := 0; i < 100; i++ {
wg.Add(1)
go add()
}
wg.Wait()
fmt.Println("num:", num)
}mutex的必要性
锁在高度竞争时会不断挂起恢复线程从而让出cpu资源,原子变量在高度竞争时会一直占用cpu;原子操作时线程级别的,不支持协程
mutex演进
1. 互斥锁
type Mutex struct {
state int32
sema uint32
}
const (
mutexLocked = 1 << iota
mutexWoken
mutexWaiterShift = iota //根据 mutex.state >> mutexWaiterShift 得到当前等待的 goroutine 数目
)state表示当前锁的状态,是一个共用变量
state: |32|31|....|3|2|1|
\__________/ | |
| | |
| | 当前mutex是否加锁
| |
| 当前mutex是否被唤醒
|
等待队列的goroutine协程数
Lock 方法申请对 mutex 加锁的时候分两种情况
- 无冲突 通过 CAS 操作把当前状态设置为加锁状态
- 有冲突 通过调用 semacquire 函数来让当前 goroutine 进入休眠状态,等待其他协程释放锁的时候唤醒
//如果已经加锁,那么当前协程进入休眠阻塞,等待唤醒
func (m *Mutex) Lock() {
// 快速加锁:CAS更新state为locked
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
return
}
awoke := false //当前goroutine是否被唤醒
for {
old := m.state // 保存当前state的状态
new := old | mutexLocked // 新值locked位设置为1
// 如果当前处于加锁状态,新到来的goroutine进入等待队列
if old&mutexLocked != 0 {
new = old + 1<<mutexWaiterShift
}
if awoke {
//如果被唤醒,新值需要重置woken位为 0
new &^= mutexWoken
}
// 两种情况会走到这里:1.休眠中被唤醒 2.加锁失败进入等待队列
// CAS 更新,如果更新失败,说明有别的协程抢先一步,那么重新发起竞争。
if atomic.CompareAndSwapInt32(&m.state, old, new) {
// 如果更新成功,有两种情况
// 1.如果为 1,说明当前 CAS 是为了更新 waiter 计数
// 2.如果为 0,说明是抢锁成功,那么直接 break 退出。
if old&mutexLocked == 0 {
break
}
runtime_Semacquire(&m.sema) // 此时如果 sema <= 0 那么阻塞在这里等待唤醒,也就是 park 住。走到这里都是要休眠了。
awoke = true // 有人释放了锁,然后当前 goroutine 被 runtime 唤醒了,设置 awoke true
}
}
if raceenabled {
raceAcquire(unsafe.Pointer(m))
}
}UnLock 解锁分两步
- 解锁,通过CAS操作把当前状态设置为解锁状态
- 唤醒休眠协程,CAS操作把当前状态的waiter数减1,然后唤醒休眠goroutine
//锁没有和某个特定的协程关联,可以由一个协程lock,另一个协程unlock
func (m *Mutex) Unlock() {
if raceenabled {
_ = m.state
raceRelease(unsafe.Pointer(m))
}
// CAS更新state的状态为locked 注意:解锁的瞬间可能会有新的协程到来并抢到锁
new := atomic.AddInt32(&m.state, -mutexLocked)
// 释放了一个没上锁的锁会panic:原先的lock位为0
if (new+mutexLocked)&mutexLocked == 0 {
panic("sync: unlock of unlocked mutex")
}
//判断是否需要释放资源
old := new
for {
/**
* 不需要唤醒的情况
* 1.等待队列为0
* 2.已经有协程抢到锁(上面的瞬间抢锁)
* 3.已经有协程被唤醒
*/
if old>>mutexWaiterShift == 0 || old&(mutexLocked|mutexWoken) != 0 {
return
}
//将waiter计数位减一,并设置state为woken(唤醒)
//问:会同时有多个被唤醒的协程存在吗
new = (old - 1<<mutexWaiterShift) | mutexWoken
if atomic.CompareAndSwapInt32(&m.state, old, new) {
runtime_Semrelease(&m.sema) // cas成功后,再做sema release操作,唤醒休眠的 goroutine
return
}
old = m.state
}
}知识点
使用&来判断位值,使用|来设置位值,使用&^来清空位置(内存对齐)
一代互斥锁的问题
处于休眠中的goroutine优先级低于当前活跃的,unlock解锁的瞬间最新的goroutine会抢到锁
大多数果锁的时间很短,所有的goroutine都要休眠,增加runtime调度开销
2. 自旋锁
Lock 方法申请对 mutex 加锁的时候分三种情况
- 无冲突 通过 CAS 操作把当前状态设置为加锁状态
- 有冲突 开始自旋,并等待锁释放,如果其他 goroutine 在这段时间内释放了该锁,直接获得该锁;如果没有释放,进入3
- 有冲突 通过调用 semacquire 函数来让当前 goroutine 进入等待状态,等待其他协程释放锁的时候唤醒
func (m *Mutex) Lock() {
//快速加锁,逻辑不变
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
return
}
awoke := false
iter := 0
for {
old := m.state
new := old | mutexLocked
if old&mutexLocked != 0 { // 如果当前己经上锁,那么判断是否可以自旋
//短暂的自旋过后如果无果,就只能通过信号量让当前goroutine进入休眠等待了
if runtime_canSpin(iter) {
// Active spinning makes sense.
/**
* 自旋的操作:设置state为woken,这样在unlock的时候就不会唤醒其他协程.
* 自旋的条件:
* 1.当前协程未被唤醒 !awoke
* 2.其他协程未被唤醒 old&mutexWoken == 0
* 3.等待队列大于0
*/
if !awoke && old&mutexWoken == 0 && old>>mutexWaiterShift != 0 &&
atomic.CompareAndSwapInt32(&m.state, old, old|mutexWoken) {
awoke = true
}
//进行自旋操作
runtime_doSpin()
iter++
continue
}
new = old + 1<<mutexWaiterShit
}
if awoke {
//todo 为什么加这个判断
if new&mutexWoken == 0 {
panic("sync: inconsistent mutex state")
}
new &^= mutexWoken
}
if atomic.CompareAndSwapInt32(&m.state, old, new) {
if old&mutexLocked == 0 {
break
}
runtime_Semacquire(&m.sema)
awoke = true
iter = 0
}
}
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
}path: runtime/proc.go
const (
mutex_unlocked = 0
mutex_locked = 1
mutex_sleeping = 2
active_spin = 4
active_spin_cnt = 30
passive_spin = 1
)
/**
* 有四种情况会返回false
* 1.已经执行了很多次 iter >= active_spin 默认为4。避免长时间自旋浪费CPU
* 2.是单核CPU ncpu <= 1 || GOMAXPROCS < 1 保证除了当前运行的Goroutine之外,还有其他的Goroutine在运行
* 3.没有其他正在运行的p
* 4 当前P的G队列为空 避免自旋锁等待的条件是由当前p的其他G来触发,这样会导致再自旋变得没有意义,因为条件永远无法触发
*/
func sync_runtime_canSpin(i int) bool {
// sync.Mutex is cooperative, so we are conservative with spinning.
// Spin only few times and only if running on a multicore machine and
// GOMAXPROCS>1 and there is at least one other running P and local runq is empty.
// As opposed to runtime mutex we don't do passive spinning here,
// because there can be work on global runq or on other Ps.
if i >= active_spin || ncpu <= 1 || gomaxprocs <=
int32(sched.npidle+sched.nmspinning)+1 {
return false
}
if p := getg().m.p.ptr(); !runqempty(p) {
return false
}
return true
}
// 自旋逻辑
// procyeld函数内部循环调用PAUSE指令,PAUSE指令什么都不做,但是会消耗CPU时间
// 在这里会执行30次PAUSE指令消耗CPU时间等待锁的释放;
func sync_runtime_doSpin() {
procyield(active_spin_cnt)
}
TEXT runtime·procyield(SB),NOSPLIT,$0-0
MOVL cycles+0(FP), AX
again:
PAUSE
SUBL $1, AX
JNZ again
RET问题:
- 还是没有解决休眠进程优先级低的问题
3. 公平锁
基本逻辑
- Mutex 两种工作模式,normal 正常模式,starvation 饥饿模式。normal 情况下锁的逻辑与老版相似,休眠的 goroutine 以 FIFO 链表形式保存在 sudog 中,被唤醒的 goroutine 与新到来活跃的 goroutine 竞解,但是很可能会失败。如果一个 goroutine 等待超过 1ms,那么 Mutex 进入饥饿模式
- 饥饿模式下,解锁后,锁直接交给 waiter FIFO 链表的第一个,新来的活跃 goroutine 不参与竞争,并放到 FIFO 队尾
- 如果当前获得锁的 goroutine 是 FIFO 队尾,或是等待时长小于 1ms,那么退出饥饿模式
- normal 模式下性能是比较好的,但是 starvation 模式能减小长尾 latency
LOCK流程:
- 无冲突 通过 CAS 操作把当前状态设置为加锁状态
- 有冲突 开始自旋 如果是饥饿模式禁止自旋,开始自旋,并等待锁释放,如果其他 goroutine 在这段时间内释放了该锁,直接获得该锁;如果没有释放,进入3
- 有冲突,且已经过了自旋阶段 通过调用 semacquire 函数来让当前 goroutine 进入等待状态,等待其他协程释放锁的时候唤醒,休眠前:如果是饥饿模式,把当前协程放到队列最前面;唤醒后:如果是饥饿模式唤醒的,直接获得锁
type Mutex struct {
state int32
sema **uint32**
}
// A Locker represents an object that can be locked and unlocked.
type Locker interface {
Lock()
Unlock()
}
//为什么使用位掩码表达式
//第3位到第32位表示等待在mutex上协程数量
const (
mutexLocked = 1 << iota // mutex is locked
mutexWoken
mutexStarving //新增饥饿状态
mutexWaiterShift = iota
starvationThresholdNs = 1e6 //饥饿状态的阈值:等待时间超过1ms就会进入饥饿状态
)
func (m *Mutex) Lock() {
//快速加锁:逻辑不变
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
return
}
var waitStartTime int64 //等待时间
starving := false //饥饿标记
awoke := false //唤醒标记
iter := 0 //循环计数器
old := m.state //保存当前锁状态
for {
// 自旋的时候增加了一个判断:如果处于饥饿状态就不进入自旋,因为饥饿模式下,释放的锁会直接给等待队列的第一个,当前协程直接进入等待队列
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
if !awoke && old&mutexWoken == 0 && old>>mutexWaiterShift != 0 &&
atomic.CompareAndSwapInt32(&m.state, old, old|mutexWoken) {
awoke = true
}
runtime_doSpin()
iter++
old = m.state
continue
}
new := old
// 当mutex不处于饥饿状态的时候,将new值设置为locked,也就是说如果是饥饿状态,新到来的goroutine直接排队
if old&mutexStarving == 0 {
new |= mutexLocked
}
// 当mutex处于加锁锁或者饥饿状态时,新到来的goroutine进入等待队列
if old&(mutexLocked|mutexStarving) != 0 {
new += 1 << mutexWaiterShift
}
// 当等待时间超过阈值,当前goroutine切换mutex为饥饿模式,如果未加锁,就不需要切换
if starving && old&mutexLocked != 0 {
new |= mutexStarving
}
if awoke {
if new&mutexWoken == 0 {
throw("sync: inconsistent mutex state")
}
new &^= mutexWoken
}
if atomic.CompareAndSwapInt32(&m.state, old, new) {
// mutex 处于未加锁,正常模式下,当前 goroutine 获得锁
if old&(mutexLocked|mutexStarving) == 0 {
break // locked the mutex with CAS
}
// 如果已经在排队了,就排到队伍的最前面
queueLifo := waitStartTime != 0
if waitStartTime == 0 {
waitStartTime = runtime_nanotime()
}
// queueLifo 为真的时候,当前goroutine会被放到队头,
// 也就是说被唤醒却没抢到锁的goroutine放到最前面
runtime_SemacquireMutex(&m.sema, queueLifo)
// 当前goroutine等待时间超过阈值,切换为饥饿模式,starving设置为true
starving = starving || runtime_nanotime()-waitStartTime > starvationThresholdNs
old = m.state
//如果当前是饥饿模式
if old&mutexStarving != 0 {
if old&(mutexLocked|mutexWoken) != 0 || old>>mutexWaiterShift == 0 {
throw("sync: inconsistent mutex state")
}
// 如果切换为饥饿模式,等待队列计数减1
delta := int32(mutexLocked - 1<<mutexWaiterShift)
// 如果等待时间小于1ms或者自己是最后一个被唤醒的,退出饥饿模式
if !starving || old>>mutexWaiterShift == 1 {
delta -= mutexStarving
}
atomic.AddInt32(&m.state, delta)
break
}
awoke = true
iter = 0
} else {
old = m.state
}
}
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
}UnLock 解锁分两步
- 解锁,通过CAS操作把当前状态设置为解锁状态
- 唤醒休眠协程,CAS操作把当前状态的waiter数减1,然后唤醒休眠goroutine,如果是饥饿模式的话,唤醒等待队列的第一个
func (m *Mutex) Unlock() {
if race.Enabled {
_ = m.state
race.Release(unsafe.Pointer(m))
}
new := atomic.AddInt32(&m.state, -mutexLocked)
if (new+mutexLocked)&mutexLocked == 0 {
throw("sync: unlock of unlocked mutex")
}
if new&mutexStarving == 0 {
// 正常模式
old := new
for {
/**
* 不需要唤醒的情况
* 1.等待队列为0
* 2.已经有协程抢到锁(上面的瞬间抢锁)
* 3.已经有协程被唤醒
* 4.处于饥饿模式 在饥饿模式获取到锁的协程仍然处于饥饿状态,新的goroutine无法获取到锁
*/
if old>>mutexWaiterShift == 0 || old&(mutexLocked|mutexWoken|mutexStarving) != 0 {
return
}
// Grab the right to wake someone.
new = (old - 1<<mutexWaiterShift) | mutexWoken
if atomic.CompareAndSwapInt32(&m.state, old, new) {
runtime_Semrelease(&m.sema, false)
return
}
old = m.state
}
} else {
// 饥饿模式
runtime_Semrelease(&m.sema, true)
}
}到此这篇关于Golang 锁原理的简单实现的文章就介绍到这了,更多相关Golang 锁内容请搜索好代码网以前的文章或继续浏览下面的相关文章希望大家以后多多支持好代码网!